


Der einbeinige Hüpfroboter "Salto" beweist: Selbst der Hickelkasten ist nicht vor den Maschinen sicher.
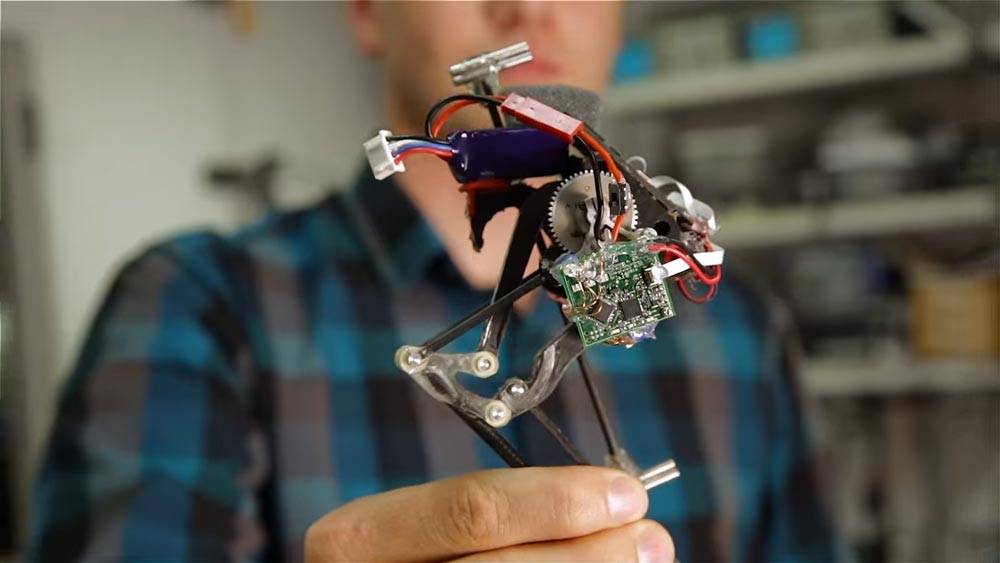
Wissenschaftler der Universität Berkeley entwickeln den vergnügt anmutenden Springroboter "Salto": Er ist dem Senegal-Galago nachempfunden, einer Affenart, die sich Kraft eigener Oberschenkel meterhoch in die Luft katapultieren kann.
Allerdings: Im Unterschied zu den kleinen Äffchen reicht Salto schon ein einzelnes Beinchen, um seinen 100 Gramm leichten Körper in die Luft zu schleudern. Rund zehn Minuten kann Salto am Stück hüpfen und sich selbst vor der Tür auf unebenem Gelände souverän fortbewegen.


Seit der ersten Entwicklerversion vor rund drei Jahren gelang es den Entwicklern, sämtliche für die Balance und Orientierung nötigen Sensoren in den Roboter zu integrieren. Bei der ersten Version wurden noch externe Motion-Capture-Kameras eingesetzt, die den Roboter in Kombination mit einer Computersoftware ausbalancierten. Allerdings erkundet Salto die Umgebung noch nicht auf eigene Faust, die Entwickler steuern ihn fern.
Ein Spielzeug soll Salto trotz seiner spielerischen Leichtigkeit nicht werden. Laut der Entwickler kann der Miniroboter Plätze erreichen, die für größere Roboter oder Menschen unzugänglich sind.
Durch die schnellen und hohen Sprünge könne er beispielsweise schnell durch ein Katastrophengebiet navigieren. Salto kann Flächen für den Absprung nutzen, die zu instabil sind, um darauf zu verweilen. Sogar den Wandsprung beherrscht der Miniroboter.

Der kleine Einbein-Springer ist laut der Forscher erst der Anfang. Das Robotermodell könne zum Beispiel mit Armen erweitert werden, um sich an Bäumen festzuhalten. Ebenso sei es möglich, noch kleinere oder deutlich größere Springroboter zu bauen mit unterschiedlichen Formfaktoren.


Quelle & Titelbild: Universität Berkeley
Weiterlesen über Roboter:
- Weshalb Roboter noch über Realitätslücken stolpern
- Boston Dynamics präsentiert Verkaufsversion des Hunderoboters Spotmini
- Dank KI und VR: Dieser Roboterarm soll mal eure Hausarbeit erledigen
- Prügelmaschine: Dieser Roboter haut VR-Nutzern passend eine rein