Roboter lernen fühlen: Neue Technik UniT vermittelt Tastsinn für präzise Manipulation
Ein Team der Purdue University hat eine neue Technik namens UniT vorgestellt, die es Robotern ermöglicht, Berührungsinformationen besser zu verarbeiten und auf verschiedene Aufgaben zu übertragen.
Wissenschaftler der Purdue University haben eine Methode entwickelt, die Robotern eine effizientere Verarbeitung taktiler Informationen ermöglicht. Die als UniT (Unified Tactile Representation) bezeichnete Technik nutzt ein spezielles maschinelles Lernverfahren, um aus einfachen Berührungsdaten eine vielseitig einsetzbare Repräsentation zu erstellen.
Ziel ist es, Robotern neben visuellen Informationen auch den Tastsinn zu vermitteln, ähnlich wie Menschen ihn zur Interaktion mit Objekten nutzen. Das Besondere an UniT: Die taktile Repräsentation kann mit Daten von nur einem einfachen Objekt trainiert werden. In den Experimenten verwendeten die Forscher dafür einen Inbusschlüssel oder eine kleine Kugel.
Video: Xu, Uppuluri et al.
Zur Erfassung der taktilen Daten kam ein GelSight-Sensor zum Einsatz. Dieser besteht aus einem elastischen Gel mit eingebetteten Markern, das sich bei Berührung verformt. Eine Kamera nimmt diese Verformungen auf. Diese Bilder zeigen, wie das Objekt gedrückt oder bewegt wird, und geben so Informationen über Form, Position und die Kräfte, die auf das Objekt wirken.
Die Forscher nutzen dann ein VQVAE, um die Informationen aus den taktilen Bildern in kompakter Form zu speichern. Dies ermöglicht dem Roboter, effizient zu lernen und die Fähigkeiten auf verschiedene Aufgaben anzuwenden.
UniT verbessert Roboterleistung deutlich
In Experimenten zeigte sich, dass die mit UniT erlernte Repräsentation gut auf unbekannte Objekte übertragen werden konnte. So ließen sich beispielsweise die Kontaktgeometrie und Kraftverteilung bei der Berührung verschiedener Gegenstände rekonstruieren, obwohl das System nur mit einem einfachen Objekt trainiert wurde.
UniT ermöglicht es dem Roboter auch, ohne zusätzliches Training verschiedene Aufgaben zu bewältigen, wie die Position eines USB-Steckers zu erkennen oder Gegenstände präzise zu greifen. Dabei zeigt UniT bessere Ergebnisse als frühere Methoden, die nur auf visuelle Informationen setzen oder den Tastsinn wie eine zusätzliche Kamera behandeln.
Video: Xu, Uppuluri et al.
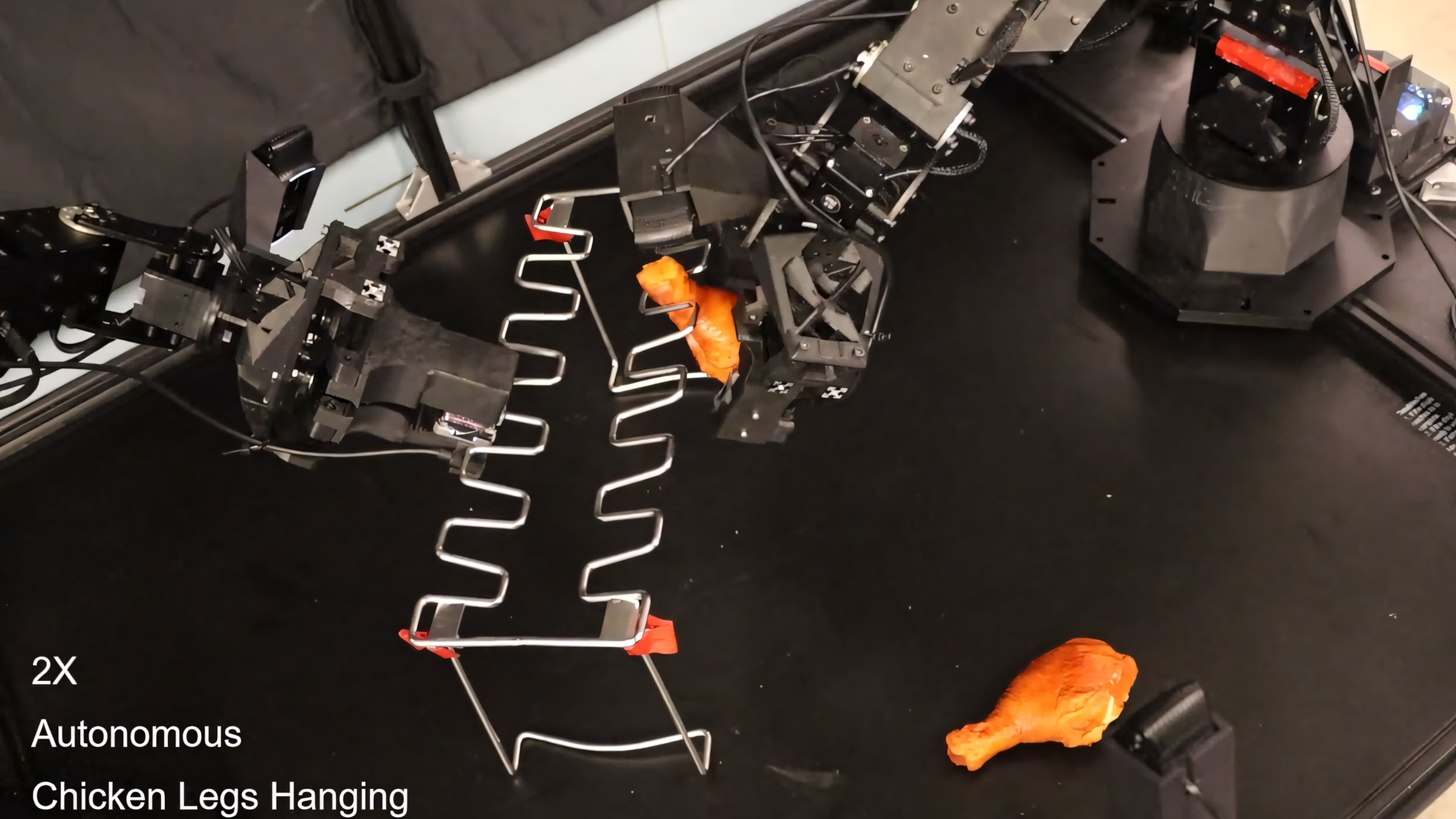
Die Forscher demonstrierten die Leistungsfähigkeit von UniT anhand mehrerer robotischer Aufgaben. Bei der 3D-Posenschätzung eines USB-Steckers übertraf die Methode andere Ansätze deutlich. Auch in Manipulationsaufgaben wie dem Aufhängen von Hühnchenbeinen oder dem Greifen zerbrechlicher Chips zeigte sich die Überlegenheit der UniT-basierten Steuerung.
Video: Xu, Uppuluri et al.
Video: Xu, Uppuluri et al.
Die Forscher sehen noch Potenzial für Weiterentwicklungen. So könnte die Methode in Zukunft auf weiche Objekte ausgeweitet oder um physikalische Modelle ergänzt werden.
Mehr Informationen und den Code gibt es auf GitHub.
KI-News ohne Hype – von Menschen kuratiert
Mit dem THE‑DECODER‑Abo liest du werbefrei und wirst Teil unserer Community: Diskutiere im Kommentarsystem, erhalte unseren wöchentlichen KI‑Newsletter, 6× im Jahr den „KI Radar"‑Frontier‑Newsletter mit den neuesten Entwicklungen aus der Spitze der KI‑Forschung, bis zu 25 % Rabatt auf KI Pro‑Events und Zugriff auf das komplette Archiv der letzten zehn Jahre.
Jetzt abonnierenKI-News ohne Hype
Von Menschen kuratiert.
- Mehr als 20 Prozent Launch-Rabatt.
- Lesen ohne Ablenkung – keine Google-Werbebanner.
- Zugang zum Kommentarsystem und Austausch mit der Community.
- Wöchentlicher KI-Newsletter.
- 6× jährlich: „KI Radar“ – Deep-Dives zu den wichtigsten KI-Themen.
- Bis zu 25 % Rabatt auf KI Pro Online-Events.
- Zugang zum kompletten Archiv der letzten zehn Jahre.
- Die neuesten KI‑Infos von The Decoder – klar und auf den Punkt.