Nie wieder Wäsche falten? Textil-Roboter machen Fortschritte

Roboter, die mit Textilien arbeiten können, haben viele potenzielle Anwendungsszenarien: Fließbandarbeit in der Textilindustrie, Wäschefalten für Heimanwender oder bei Katastrophen Notunterkünfte und Zelte für die medizinische Erstversorgung errichten. Die Vielfalt an Textilien macht ihre Entwicklung komplex, aber es geht voran.
Die Arbeit mit Textilien ist schwierig für Roboter, da Stoffe sehr flexibel sind und ihr Verhalten daher schwer vorhersehbar ist für unflexible Roboterhände. Aktuelle Textil-Roboter sind daher immer nur auf eine Aufgabe bei der Textilverarbeitung spezialisiert. Ändern sich die Rahmenbedingungen, scheitern sie schnell.
Ein Roboter für die Heimarbeit oder die Altenpflege muss jedoch mit verschiedenen textilen Aufgaben unter unterschiedlichen Bedingungen klarkommen. Forscher arbeiten an einem KI-System, das einen wichtigen Schritt hin zu nützlichen Textil-Robotern darstellt.
Textil-Simulation statt Echtwelt-Beispiele
Um mit den flexiblen Stoffen umgehen zu können, muss eine KI die Dynamik der Textilien verstehen – wie bewegen sie sich, wie interagieren Falten miteinander, was passiert, wenn ein Teil des Materials umgeklappt wird?
Die Forscher der Universität Berkeley und des Honda Research Instituts setzten dafür auf Stoff-Beispiele: Die Künstliche Intelligenz lernt anhand zahlreicher simulierter Stoff-Bewegungen, wie sich Textilien verhalten. Ähnliche Ansätze gab es bereits, die setzten jedoch auf zeitaufwendiges Robotertraining in der echten Welt.
In der physikalisch korrekten Stoff-Simulation sieht die KI tausende Beispiele für Textilglättungen und -faltungen: In einem Beispiel faltet sich ein Textilquadrat diagonal, in einem anderen doppelt und aus einem zerknitterten Stück Stoff wird ein sauber geglättetes Quadrat.
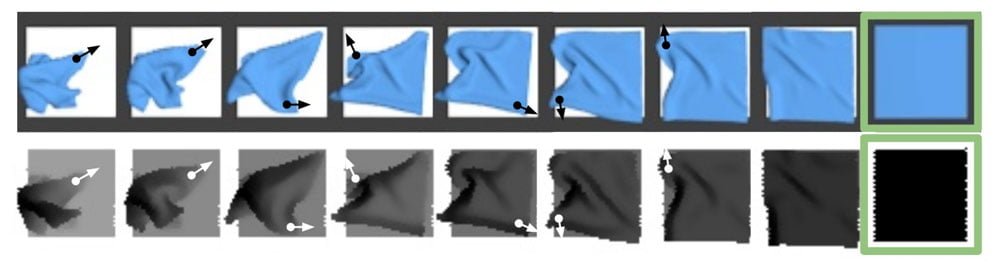
Die Textil-KI lernt während des KI-Trainings, die verschiedenen Zwischenpositionen und die Endposition der Textilien vorherzusagen. Im Laufe des Trainings werden diese Vorhersagen immer präziser. Das Modell lernt so die korrekte Repräsentation der Textildynamik.
Falten, Glätten und die echte Welt
Nach dem Training kann die KI in der Simulation ein zufällig positioniertes Stück Stoff in einen vorgegebenen Zustand bringen, etwa flach ausbreiten oder diagonal falten. Informationen über das Stück Stoff erhält die KI in Form von Farb- und Tiefendaten. Je nach Schwierigkeit der Aufgabe erreicht sie in der Simulation eine Genauigkeit zwischen 75 und 93 Prozent.
In einem darauffolgenden Echtwelttest mit einem Roboter konnte die KI ihre Fähigkeiten aus der Simulation mit Einbußen umsetzen. Das Missverhältnis zwischen Simulationsleistung und Echtweltkönnen erklären die Forscher damit, dass in der Simulation kein exaktes Modell des in der echten Welt verwendeten Da-Vinci-Roboterarms genutzt wurde.
Ein Beispiel für die Glättungsfähigkeiten des Textil-Roboters zeigt das folgende Video. Der Einsatz in der echten Welt ist langsam (daher sind die Stimmen schnell), aber Beispiele wie diese zeigen, dass die KI ihre in der Simulation gelernten Fähigkeiten zumindest teilweise unter echten Bedingungen anwenden kann.
Der Textil-Roboter erreicht in der echten Welt zwar noch nicht die in der Simulation gezeigte Leistung und muss jede Bewegung mehrere Sekunden planen. Doch für die Forscher beweist das Resultat, dass das Training mit zufällig generierten Textil-Interaktionen in einer Simulation tatsächlich zu einer „vielversprechenden Generalisierung für verschiedene Textilglättungen und -faltungen“ führt.
Als Nächstes wollen die Forscher die Echtweltleistung der Simulationsperformanz annähern. Dieser sogenannte Sim2Real-Transfer ist eine der großen Herausforderungen des bestärkenden Lernens (Erklärung).
Via: Arxiv
KI-News ohne Hype – von Menschen kuratiert
Mit dem THE‑DECODER‑Abo liest du werbefrei und wirst Teil unserer Community: Diskutiere im Kommentarsystem, erhalte unseren wöchentlichen KI‑Newsletter, 6× im Jahr den „KI Radar"‑Frontier‑Newsletter mit den neuesten Entwicklungen aus der Spitze der KI‑Forschung, bis zu 25 % Rabatt auf KI Pro‑Events und Zugriff auf das komplette Archiv der letzten zehn Jahre.
Jetzt abonnierenKI-News ohne Hype
Von Menschen kuratiert.
- Mehr als 20 Prozent Launch-Rabatt.
- Lesen ohne Ablenkung – keine Google-Werbebanner.
- Zugang zum Kommentarsystem und Austausch mit der Community.
- Wöchentlicher KI-Newsletter.
- 6× jährlich: „KI Radar“ – Deep-Dives zu den wichtigsten KI-Themen.
- Bis zu 25 % Rabatt auf KI Pro Online-Events.
- Zugang zum kompletten Archiv der letzten zehn Jahre.
- Die neuesten KI‑Infos von The Decoder – klar und auf den Punkt.