KI-Drohne schlägt menschliche Profis bei Drohnenrennen

Bei Drohnenrennen steuern menschliche Piloten aus der Ego-Perspektive Miniaturflugzeuge in atemberaubender Geschwindigkeit durch anspruchsvolle Parcours. Jetzt übernimmt die KI die Pole-Position - mit deutlichem Vorsprung und wenigen Einschränkungen.
Mit Swift präsentieren Forschende der Universität Zürich und von Intel eine autonome Renndrohne, die menschliche Profis in Drohnenrennen geschlagen hat. Die mit Kameras und weiteren Sensoren ausgestattete KI-Drohne Swift gewann fünf von neun Rennen gegen Alex Vanover, vier von sieben gegen Thomas Bitmatta und sechs von neun gegen Marvin Schaepper. Insgesamt konnte Swift 60 Prozent der Rennen für sich entscheiden.
Nicht alle Rennen endeten mit einem KI-Sieg: 40 Prozent der Niederlagen waren auf Kollisionen mit Konkurrenten oder Toren zurückzuführen, 20 Prozent auf eine geringere Geschwindigkeit als die der menschlichen Piloten.
Immer am Limit, mit mehr Vorausplanung
Die Siege von Swift sind dennoch bemerkenswert. Die KI-Drohne erzielte die insgesamt schnellste Rennzeit, auch wenn sie nicht in jedem Streckenabschnitt schneller war, und schlug den nächstbesten Menschen (A. Vanover) um eine halbe Sekunde. Die menschlichen Profis hatten eine Woche Zeit, auf der Rennstrecke zu trainieren.
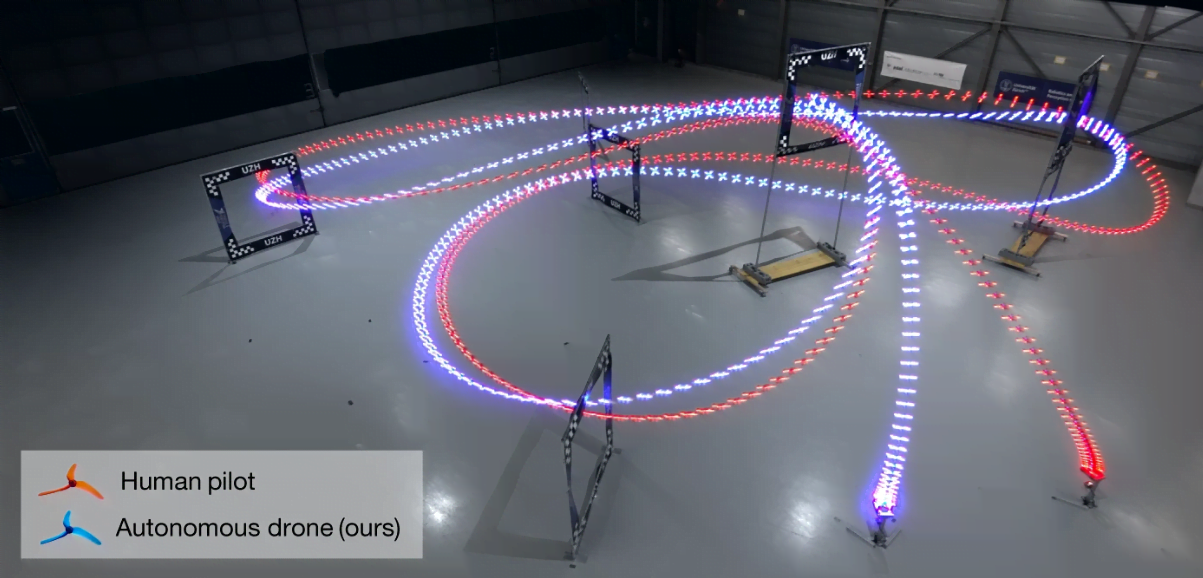
Wo ist Swift dem Menschen überlegen? Zum einen hat die Drohne eine schnellere Reaktionszeit beim Start. Außerdem hält sie in der ersten Kurve eine höhere Geschwindigkeit und fliegt enger durch die Kurven - eine erfolgreiche Strategie, die vermutlich auf die längerfristige Planung von Swift zurückzuführen ist.
Noch ist der Mensch robuster
Auch im Kopf-an-Kopf-Zeitfahren glänzt Swift. Die KI-Drohne ist konsequent auf Höchstgeschwindigkeit getrimmt. Das reduziert die Wahrscheinlichkeit von Rundenzeitschwankungen.
Bei menschlichen Piloten schwanken die Rundenzeiten dagegen stärker, weil sie ihre Flugstrategie an ihre Position im Rennen anpassen. Wenn sie beispielsweise in Führung liegen, reduzieren menschliche Piloten ihre Geschwindigkeit, um einen Crash zu vermeiden.
Diesen Luxus leistet sich Swift nicht: Die KI-Drohne jagt der Bestzeit hinterher, egal ob sie das Rennen anführt oder zurückliegt.
Trotz des Erfolgs von Swift ist die Robustheit des Menschen bemerkenswert, stellt das Forscherteam fest. Menschliche Piloten verkraften einen Unfall bei voller Geschwindigkeit und setzen das Rennen fort, sofern die Drohne noch intakt ist.
Sie können sich auch besser an Veränderungen in ihrer Umgebung anpassen, zum Beispiel an veränderte Lichtverhältnisse, die das Wahrnehmungssystem von Swift irritieren können.
KI-Training in der Simulation und mit realen Daten
Swift basiert auf einem Wahrnehmungssystem, das interpretiert, was die Drohne sieht und über Sensoren "fühlt", und einer Steuerungsstrategie, die diese Informationen nutzt, um die nächste Bewegung der Drohne zu bestimmen.
Das Wahrnehmungssystem ist wie die Augen und Sinne der Drohne. Es verwendet ein VIO-Modul (Visual Inertial Odometry), das die von der Drohnenkamera erfassten Daten mit den Bewegungs- und Trägheitsmerkmalen der Drohne kombiniert.
Auf diese Weise kann es bestimmen, wo es sich in der realen Welt befindet. Parallel dazu erkennt ein spezielles neuronales Netz anhand der Kamerabilder die Ecken der Renntore.
Anschließend kartiert es diese Erkennungen im 3D-Raum und kombiniert diese Informationen mit den Schätzungen der VIO über die Position der Drohne mithilfe eines mathematischen Kalman-Filters.
Sobald die Drohne weiß, wo sie sich in der Welt befindet und wo sich die Renntore befinden, kommt die Steuerstrategie ins Spiel.
So wie ein menschlicher Pilot entscheiden würde, ob er auf ein Tor zufliegt oder die Geschwindigkeit erhöht, entscheidet die Steuerungsstrategie, was die Drohne als nächstes tun soll.
Die mit Deep Reinforcement Learning trainierte Strategie belohnt Swift dafür, dass sie sich zur Mitte des nächsten Tores bewegt, und gleichzeitig dafür sorgt, dass das nächste Tor im Blickfeld der Drohne bleibt.
Ungeachtet der verbleibenden Einschränkungen und der noch zu leistenden Arbeit ist die Leistung eines autonomen mobilen Roboters auf Weltmeisterschaftsniveau in einer populären Sportart ein Meilenstein für die Robotik und die maschinelle Intelligenz. Diese Arbeit kann den Einsatz von lernbasierten Hybridlösungen in anderen physischen Systemen wie autonomen Bodenfahrzeugen, Flugzeugen und persönlichen Robotern in einem breiten Spektrum von Anwendungen inspirieren.
Aus dem Paper
Eine der größten Herausforderungen für das Forschungsteam bestand darin, herauszufinden, wie die Steuerungsentscheidungen von der anfänglichen virtuellen Trainingssimulation in die reale Welt übertragen werden können.
Um diese "Realitätslücke" zu schließen, wurde die Simulation mit datengesteuerten Modellen verbessert, die berücksichtigen, wie die Drohne ihre Umgebung wahrnimmt und sich in der realen Welt bewegt. Diese zusätzliche Feinabstimmung basierte auf realen Daten, die mit der Drohne auf der Rennstrecke selbst gesammelt wurden. Auf diese Weise konnte Swift in der Simulation und aus der Realität lernen.
KI-News ohne Hype – von Menschen kuratiert
Mit dem THE‑DECODER‑Abo liest du werbefrei und wirst Teil unserer Community: Diskutiere im Kommentarsystem, erhalte unseren wöchentlichen KI‑Newsletter, 6× im Jahr den „KI Radar"‑Frontier‑Newsletter mit den neuesten Entwicklungen aus der Spitze der KI‑Forschung, bis zu 25 % Rabatt auf KI Pro‑Events und Zugriff auf das komplette Archiv der letzten zehn Jahre.
Jetzt abonnierenKI-News ohne Hype
Von Menschen kuratiert.
- Mehr als 20 Prozent Launch-Rabatt.
- Lesen ohne Ablenkung – keine Google-Werbebanner.
- Zugang zum Kommentarsystem und Austausch mit der Community.
- Wöchentlicher KI-Newsletter.
- 6× jährlich: „KI Radar“ – Deep-Dives zu den wichtigsten KI-Themen.
- Bis zu 25 % Rabatt auf KI Pro Online-Events.
- Zugang zum kompletten Archiv der letzten zehn Jahre.
- Die neuesten KI‑Infos von The Decoder – klar und auf den Punkt.