Autonomes Fahren: Lidar & KI - so entstehen HD-Karten
Autonome Fahrsysteme nutzen moderne Sensorsysteme wie Lidar zur genauen Umgebungsanalyse.
Die GPS-Navigation ist aus dem Alltag kaum mehr wegzudenken. Wir alle nutzen regelmäßig Apps wie Google Maps, um uns im täglichen Straßenverkehr zu orientieren. Herkömmliche Smartphones und Navis sind bei freiem Himmel auf einem Radius von etwa fünf Metern genau. Das kann aber schwanken, wenn das GPS-Signal durch Gebäude, Bäume oder Berge gestört wird.
Für eine herkömmliche Routenführung ist die aktuelle GPS-Präzision ausreichend. Wüsste aber ein autonom fahrendes System nicht genau, was fünf Meter um das Auto herum passiert, wäre das fatal. Schon das automatische Einparken von Assistenzsystemen wie in der Mercedes S-Klasse wäre nicht mehr möglich.
Um sichere automatische Fahrmanöver im täglichen Verkehr zu gewährleisten, muss also eine deutlich höhere Genauigkeit erreicht werden als die der reinen GPS-Navigation. Hier kommt HD-Mapping ins Spiel. Diese hochdetaillierten Karten verfügen über genaue Informationen zur gesamten Umgebung eines Fahrzeugs.
Wie werden Daten für HD-Karten gesammelt?
Der größte Vorteil von HD-Karten gegenüber GPS-Navigation ist die genaue Darstellung der Straßenbedingungen. Ihre Details reichen vom exakten Standort eines Straßenschildes bis zur Höhe des Bordsteins. Zudem werden sie mit Echtzeitinformationen angereichert, die das Sensorsystem während der autonomen Fahrt generiert.
https://www.youtube.com/watch?v=sY8Gr6RTapM
Schon lange bevor Robo-Taxiflotten auf den teils chaotischen Verkehr in großen Innenstädten losgelassen werden, füttern sie Waymo, Baidu und Co. deshalb mit entsprechenden Verkehrsdaten. Die Entwickler fahren die Gebiete, in denen die autonomen Vehikel später eingesetzt werden sollen, mit Mapping-Cars ab und sammeln Informationen für ihre hochdetaillierten Karten.
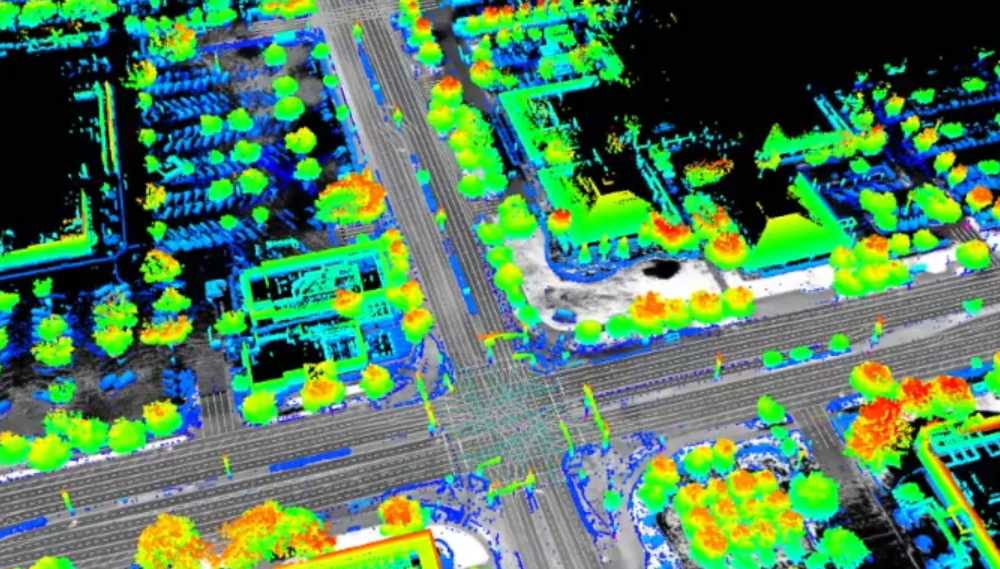
Hierbei nutzen sie die gleichen Systeme, die auch in den autonomen Fahrzeugen verbaut sind. Lidar-Sensoren werfen Lichtimpulse aus, durch die ein exaktes dreidimensionales Abbild der Umgebung in Form einer Punktwolke erstellt wird.
Straßendetails wie Abstände und Entfernungen werden so anhand der Zeit bestimmt, die ein ausgesendeter Laserstrahl benötigt, um wieder zurück zum Sensor zu gelangen. Inertiale Messeinheiten (IMUs) messen Lage, Geschwindigkeit und Position des Fahrzeugs selbst. Radar-Sensoren erfassen Objekte in der Umgebung, andere Verkehrsteilnehmer und deren Geschwindigkeit.
Auch GPS wird eingesetzt, um den Standort des Fahrzeugs zu ermitteln. Kameras dienen zur visuellen Erfassung der Umgebung. Sie können beispielsweise Signalfarben von Pylonen oder Warnwesten erkennen, erfassen aber vor allem Straßenmarkierungen und Schilder.
Datenverarbeitung durch maschinelles Lernen
Die gesammelten Daten werden anschließend von Mapping-Spezialisten aufbereitet. Sie nutzen Algorithmen wie das Convolutional Neural Network (CNN), um in erster Linie statische Objekte zu erkennen und zu klassifizieren. Dazu zählen Gebäude, aber auch Fahrbahnmarkierungen, Kuppen am Straßenrand oder Verkehrsschilder.
Somit lernt das KI-System des autonomen Fahrzeugs schon vor der ersten Fahrt, dass es sich bei den Abständen am Straßenrand beispielsweise um eine Einfahrt handelt oder der Block am Bordstein ein Hydrant ist, den es freizuhalten gilt. Die genaue Erfassung und Klassifizierung von Spurlinien ist besonders wichtig, damit das System auch bei schlechten Witterungsbedingungen stets eine Orientierungshilfe hat.
Das ist mit ein Grund, warum Fahrassistenzsysteme wie Teslas Autopilot nur auf Straßen aktiviert werden können, die über eindeutige Spurlinien verfügen.
Wozu werden HD-Karten beim autonomen Fahren benötigt?
HD-Maps werden also hauptsächlich dazu benötigt, um autonome Fahrsysteme zu entlasten und ihnen zusätzliche Orientierung zu bieten. Kennt die KI permanente Umgebungsdetails wie Ampeln, Bordsteine, Kreuzungen, Gebäude, kann es Ressourcen schonen und seine Sensoren insbesondere auf bewegliche Objekte wie andere Verkehrsteilnehmer konzentrieren.
Trotzdem nimmt das System während einer autonomen Fahrt auch weiterhin Informationen zu statischen Objekten auf. Laut Waymo gleicht die Software seiner Waymo One Taxis das vorhandene Kartenmaterial stets mit den Daten der Echtzeiterfassung ab.
Bemerkt das Fahrzeug Diskrepanzen zwischen der eingespeisten HD-Map und der Realität, schickt es automatisch eine Meldung an das Mapping-Team mit den neu erfassten Daten. Das Kartenmaterial wird also laufend überarbeitet und sofort per Over-the-Air-Update in den Systemen der restlichen Flotte aktualisiert.
Dazu kommt eine laufende manuelle Überprüfung. Der Tech-Konzern Baidu setzt bei seinem Open-Source-System Apollo zudem auf Crowdsourcing und veröffentlicht immer wieder Karten zur Verifizierung. Dadurch wird die Aktualisierung der Karten stark beschleunigt. Denn nur aktuelles Kartenmaterial sorgt für sicheres autonomes Fahren.
KI-News ohne Hype – von Menschen kuratiert
Mit dem THE‑DECODER‑Abo liest du werbefrei und wirst Teil unserer Community: Diskutiere im Kommentarsystem, erhalte unseren wöchentlichen KI‑Newsletter, 6× im Jahr den "KI Radar"‑Frontier‑Newsletter mit den neuesten Entwicklungen aus der Spitze der KI‑Forschung, bis zu 25 % Rabatt auf KI Pro‑Events und Zugriff auf das komplette Archiv der letzten zehn Jahre.
Jetzt abonnierenKI-News ohne Hype
Von Menschen kuratiert.
- Mehr als 16 % Rabatt.
- Lesen ohne Ablenkung – keine Google-Werbebanner.
- Zugang zum Kommentarsystem und Austausch mit der Community.
- Wöchentlicher KI-Newsletter.
- 6× jährlich: “KI Radar” – Deep-Dives zu den wichtigsten KI-Themen.
- Bis zu 25 % Rabatt auf KI Pro Online-Events.
- Zugang zum kompletten Archiv der letzten zehn Jahre.
- Die neuesten KI‑Infos von The Decoder – klar und auf den Punkt.