Geschichte der Roboter: Von Heron über Spot in die KI-Zukunft
Von Herons antiker Musikmaschine über den intelligenten Roboterhund Spot bis zur KI, die selbstständig das Laufen lernt: Seit der Industrialisierung hat das Roboterwesen große Sprünge zurückgelegt. Immer fortgeschrittener sind die Technologien, die uns im Alltag die Arbeit erleichtern sollen.
Hundert Jahre ist es her, seitdem die Vision der Zukunftstechnologie unwiderruflich Einzug in das Selbstverständnis der Menschheit hielt. Den Anfang machte damals eine literarische Wortneuschöpfung, die das Wesen der neuen technologischen Errungenschaften zum Ausdruck brachte: Roboter.
Doch bei einer reinen Science-Fiction-Fantasie sollte es nicht bleiben. Denn mit dem aufkommenden technologischen Fortschritt der Moderne rückte die Möglichkeit, menschliche Handlungen und Verhaltensweisen im Alltag durch Maschinen nachzuahmen, in immer greifbarere Nähe. Eine Geschichte der Robotik.
Uralte Vorstellung vom künstlichen Menschen
Die heutige Robotik (auch: Robotertechnik) befasst sich mit den Technologien, die die menschliche Interaktion mit dem Umfeld durch elektromechanische Maschinen ersetzt. Ihre Funktionsweise basiert auf Sensoren, die Informationen sammeln, einem Prozessor, der sie verarbeitet, und Aktuatoren: Sie verwandeln Signale in mechanische Prozesse.
Der Stuttgarter Technikphilosophin Catrin Misselhorn zufolge ist das Verhalten eines Roboters autonom oder wirkt zumindest so – im Gegensatz zu Computern können Roboter in ihre Umgebung hineinwirken und auf sie Einfluss nehmen.
Doch die Idee autonom agierender, oftmals menschenähnlicher Apparaturen ist uralt: Humanoide Maschinenwesen tauchten bereits in der griechischen Mythologie im 4. Jahrhundert BCE auf und fanden ebenso in alten daoistischen Texten aus dem Jahr 250 BCE Erwähnung. Und im 1. Jahrhundert CE verfasste der Mathematiker Heron von Alexandria das Werk Automata, in dem er für die Antike sensationelle automatische Geräte beschrieb.
Weltweit finden sich zahlreiche weitere Beispiele: Um 1200 erfand der arabische Gelehrte Al-Jazari unter anderem einen mechanischen Kellner, der Wein ausgießen konnte, sowie einen Händewasch-Automaten. Leonardo da Vinci skizzierte im 16. Jahrhundert einen mechanischen Ritter, im Japan des 18. und 19. Jahrhunderts sorgten mechanische Karakuri-Marionetten für Unterhaltung zu Hause, und der spanische Ingenieur und Mathematiker Leonardo Torres Quevedo entwickelte circa 1910 den ersten Schachautomaten.
Wortschöpfung mit bleibender Wirkung
Der Begriff „Roboter“ stammt ursprünglich aus einem Theaterstück des tschechischen Dramatikers Karel Čapek aus dem Jahr 1920, der damit das Phänomen künstlicher Menschen beschreiben wollte.
Vor dem Hintergrund der zunehmenden Industrialisierung und dem Bedarf an Massenproduktion nach dem Ersten Weltkrieg stellte er sich vor, wie in naher Zukunft synthetisch hergestellte, humanoide Kreaturen geschaffen würden, die menschliche Aufgaben in Fabriken und auf Kriegsfeldern übernähmen, um die Produktivität zu steigern. Ursprünglich als Sklaven gebaut, würden sie eines Tages durch eine Revolution die Macht über die Menschheit erlangen und diese ausrotten.
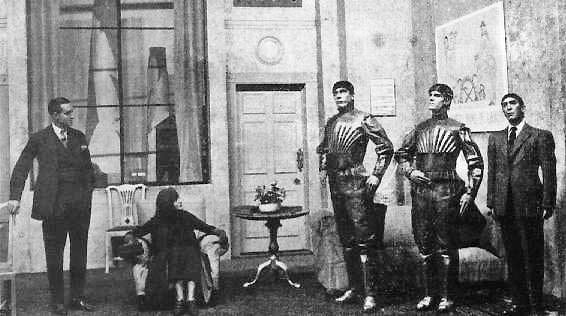
Čapeks Science-Fiction-Stück mit dem Titel R.U.R. – Rossum’s Universal Robots wurde erstmals im Januar 1921 in Prag aufgeführt. Schon bald nach der Weltpremiere erreichte es große Beliebtheit und wurde binnen zweier Jahre in dreißig Sprachen übersetzt.
Auf den Begriff „Robot“ kam Karel Čapek durch seinen Bruder Josef, der für die künstlichen Menschen das tschechische Wort roboti vorschlug, was einen Leibeigenen oder Zwangsarbeiter meint. Der Neologismus ersetzte ältere Bezeichnungen wie „Automaton“, „mechanischer Mensch“ oder „Android“.
Mensch, Maschine – oder beides?
Čapeks Roboter bestanden aus synthetischem, organischem Material, und unterscheiden sich dadurch von unserer heutigen Auffassung von Robotern als rein anorganische Maschinen. Passender für Čapeks Figuren wäre nach heutiger Definition die Bezeichnung Android: Das sind humanoide Roboter, oftmals aus künstlichem organischem Material, die ursprünglich dem Science-Fiction-Bereich entstammten.
Erstmals 1728 im Oxford English Dictionary erwähnt, wurden Androiden Ende des 18. Jahrhunderts in Ausstellungen als fortgeschrittene mechanische Apparaturen präsentiert, die Menschen ähnelten und deren Aufgaben ausführen konnten. Erst durch die weitere kulturelle Thematisierung, vorwiegend in englischsprachigen Pulp-Magazinen der 1930er- und 40er-Jahre sowie durch die Werke des Schriftstellers Isaac Asimov in den 40er- und 50er-Jahren, bildeten sich die Begriffsunterschiede stärker heraus.

Eine menschliche Hybridversion – mit sowohl organischen als auch anorganischen Körperteilen – sind Cyborgs (engl. kurz für: cybernetic organism, „kybernetischer Organismus“), die durch ihre integrierten Technologien oder künstlichen Komponenten erweiterte Fähigkeiten besitzen. In diesem Sinne kann man daher auch Menschen mit Herzschrittmachern, Defibrillatoren, komplexen Prothesen oder anderen elektronischen Implantaten bereits als Cyborgs betrachten.
Der Erste Weltkrieg: Ursprung des Roboterwesens
Der Erste Weltkrieg ließ erstmals ein Bewusstsein dafür aufkommen, dass die Menschheit durch neue technologische Erfindungen auf ihre Selbstzerstörung hinarbeiten könnte – automatisierte Technik wie Panzerwagen, Maschinengewehre und ferngesteuerte Waffen waren Beispiele solcher im Krieg eingesetzter Technologien.
Angesichts der zahlreichen Gefallenen bekam gleichzeitig die Idee Aufschwung, Soldaten in einem nächsten drohenden Krieg durch Roboter zu ersetzen, um den Verlust von Menschenleben zu verhindern.
Auch Čapeks Werk trug maßgeblich zur Debatte bei, inwiefern Technologien Arbeiter:innen befreien und körperliche Arbeit verrichten könnten. Die automatisierten Sklaven sollten im einst harten Arbeitsalltag der Arbeiter:innen paradiesische Umstände schaffen, Wohlstand generieren und sozialen Frieden herstellen, um somit den Kampf der Moderne zwischen Kapital einerseits und schwerer Arbeit andererseits aufzuheben.
Der Roboter als freundlicher Helfer des Menschen
Der japanische Biologe Makoto Nishimura unternahm Ende der 20er-Jahre einen optimistischen Versuch, einen künstlichen Menschen im Einklang mit Natur und Menschheit zu erschaffen. Im Gegensatz zu Čapeks dystopischer Zukunftsfantasie war Nishimuras Roboter ein inspirierender Freund des Menschen statt sein Sklave.
Gakutensoku (jap. für: „von den Naturgesetzen lernend“) konnte dank eines Luftdruckmechanismus unterschiedliche Gesichtsausdrücke annehmen, Kopf und Hände bewegen und sogar Wörter schreiben. Er wurde erstmals im September 1928 in Kyoto vorgestellt.
Weitere humanoide Robotermodelle mit rhetorischen Fähigkeiten entstanden zur selben Zeit in Großbritannien, und etwa zehn Jahre später wurde in den USA der Roboter Elektro präsentiert, der über ein Vokabular von 700 Wörtern verfügte, Zigaretten rauchen konnte und einen kläffenden Roboterhund namens Sparko mit sich führte.

Durch den russisch-amerikanischen Science-Fiction-Autor Isaac Asimov erlangte die Vorstellung von humanoiden Robotern weitere populäre Verbreitung. Zentral hierfür war Asimovs 1942 erschienene Kurzgeschichte Runaround, in der er erstmals den Begriff „Robotik“ verwendete. Darin formulierte er drei grundlegende Robotergesetze, die dem Schutz der Menschheit vor neuen Technologien dienen sollten. Sie lauteten:
- Ein Roboter darf kein menschliches Wesen verletzen oder durch Untätigkeit zulassen, dass einem menschlichen Wesen Schaden zugefügt wird.
- Ein Roboter muss den ihm von einem Menschen gegebenen Befehlen gehorchen – es sei denn, ein solcher Befehl würde mit dem ersten Robotergesetz kollidieren.
- Ein Roboter muss seine Existenz beschützen, solange dieser Schutz nicht mit dem ersten oder zweiten Robotergesetz kollidiert.
Auch Asimovs Vision einer robotergestützten Gesellschaft war weitaus wohlwollender als die Vorstellung einer unzuverlässigen Maschine, wie sie Čapek in seinem dystopischen Theaterstück beschrieben hatte. Der damals bereits weltbekannte Schriftsteller betrachtete Roboter als nützliche Gehilfen des Menschen. In einigen seiner Werke beschrieb er sie sogar als „bessere, reinere Spezies“ im Vergleich zum Menschen.
Fortschritte bei Robotern nach dem Zweiten Weltkrieg
Nachdem in den USA der Dreißigerjahre bereits erste roboterähnliche Apparaturen in der industriellen Produktion zum Einsatz gekommen waren, machte Konrad Zuse im Jahr 1939 mit seinem programmierbaren Rechner den endgültigen Vorstoß für humanoide Maschinen, die wir nach heutigem Verständnis als Roboter bezeichnen würden.
Die ersten digitalen und programmierbaren Roboter wurden sodann in den 50er-Jahren von George C. Devol, einem Erfinder aus Kentucky in den USA, konstruiert und für die Automobilmanufaktur eingesetzt.
Hier übernahm der Industrieroboter Unimate Aufgaben im Druckgussverfahren, die für Menschen ein Sicherheitsrisiko darstellten. Mit der bald darauf gegründeten Firma Unimation war der Grundstein des Erfolgs von Robotern in der Automobilbranche und daher in der Industrierobotik gelegt.
Erste wacklige Gehversuche
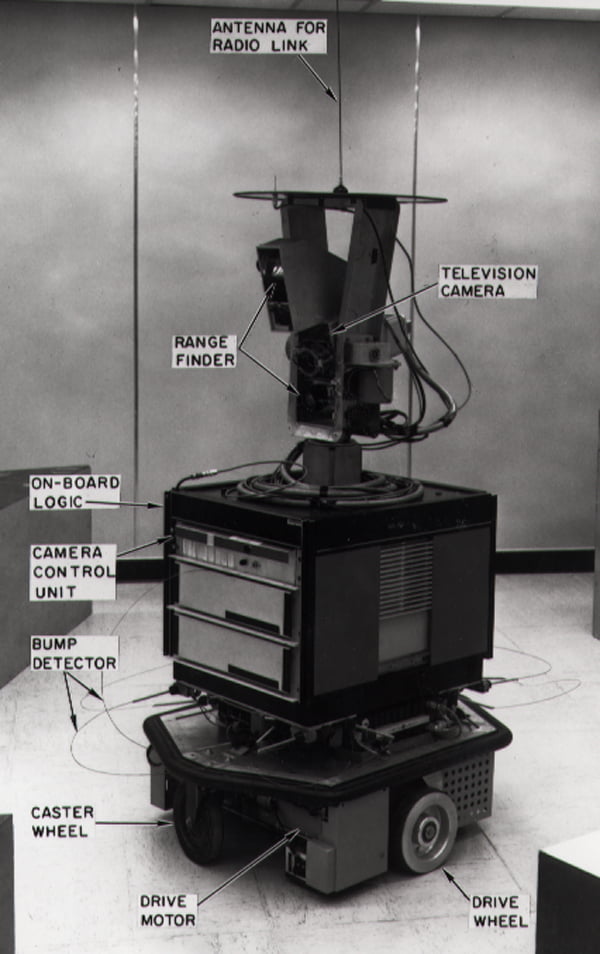
Von etwa 1966 bis 1972 entwickelte das im Silicon Valley ansässige Artificial Intelligence Center des Stanford Research Institute den ersten mobilen Roboter. Seinem Namen getreu glich Shakey the Robot eher einem langsamen, zittrigen Turm auf Rädern, der dank Kamera und Sensoren seine Umgebung wahrnehmen und sich orientieren konnte.
Die Krönung seiner Fähigkeiten war das Betätigen von Lichtschaltern und Türgriffen, Bewältigen von Hindernissen und Herumschieben von Gegenständen. Doch es war tatsächlich dieses wacklige Modell, das den Anfang der Roboterrevolution einläutete und mit seinen Forschungsergebnissen den Weg für weitere bahnbrechende Entwicklungen ebnen sollte.
Der „Personal Robot“ WABOT (WAseda roBOT) wurde in den Siebzigerjahren an der Waseda University in Tokyo entwickelt und war mit Systemen zum Sehen und Sprechen sowie für Körperbewegungen ausgestattet.
Er verfügte über künstliche Ohren, Augen und einen Mund, und konnte auf Japanisch kommunizieren sowie Entfernungen und Richtungen mithilfe externer Rezeptoren messen. Durch taktile Sensoren an seinen Händen war er in der Lage, Gegenstände zu greifen und zu bewegen. WABOT-1 hatte schätzungsweise die Intelligenz eines 18 Monate alten Kleinkinds; für einen einzigen Schritt benötigte er ganze 45 Sekunden.
Weniger vielseitig, dafür mit Fingerspitzengefühl und einem Sinn für Musik ausgestattet, war das in den Achtzigerjahren entwickelte Modell WABOT-2. Dieser auf das Keyboardspielen spezialisierte Musiker-Roboter konnte mit Menschen kommunizieren, Noten lesen und Melodien von durchschnittlichem Schwierigkeitsgrad auf einer elektronischen Orgel spielen.
Mitte der 80er-Jahre startete Honda ein Programm für humanoide Roboter und entwickelte in diesem Rahmen bis in die späten 90er-Jahre die Roboterserie P1 bis P3, die sich geschmeidig fortbewegen, winken und Hände schütteln konnten.
Video: Hondas P3 begrüßt 1997 ein menschliches Publikum.
Die Krönung dieser Forschung war im Jahr 2000 mit dem berühmten, nach Isaac Asimov benannten Zweifüßler Asimo (Advanced Step in Innovative MObility) erreicht, dessen neuere Modelle mittlerweile sogar Gebärdensprache in mehreren Sprachen beherrschen, Treppen steigen, auf einem Bein springen und tanzen können.
Roboter als Unterhaltungsspielzeug
Im Jahr 1999 stellte Sony ein neues Hightech-Spielzeug vor, den Roboterhund Aibo. Eltern, die ihren Kindern diese bellende, schwanzwedelnde Unterhaltung bieten wollten, mussten für Hund samt Zusatzsoftware tief in die Tasche greifen: Stolze 2.500 Dollar kostete das Hightech-Spielzeug, dessen Verhalten man zudem nach dem Schema „Belohnung und Strafe“ trainieren konnte.
Auf Aibo folgte ein weiterer, von Sony als sozialer Kinderfreund entworfener Roboter. Der knapp sechzig Zentimeter große Qrio (kurz für „Quest for Curiosity“) war der erste humanoide Roboter, der so zu rennen vermochte, dass sich dabei gleichzeitig beide Beine in der Luft befanden. Außerdem konnte Qrio hüpfen, Treppen steigen, vorlesen, tanzen, kichern und Fußball spielen. Er merkte sich Aussehen, Stimmen und Vorlieben seiner menschlichen Spielgefährt:innen und konnte direkt auf diese reagieren, was ihn insbesondere bei Kleinkindern zwischen 18 und 24 Monaten beliebt machte.

Ein weiterer Roboter mit Unterhaltungscharakter ist RoboSapien, der 2004 vom Hongkonger Spielzeugroboterhersteller WoWee auf den Markt gebracht wurde und sich binnen weniger Monate 1,5 Millionen Mal verkaufte. Der ferngesteuerte Roboter, den es mittlerweile in Versionen mit Kamera, MP3-Player, PC-Anschluss und sogar mehreren wählbaren Persönlichkeiten gibt, kann auf Geräusche und Berührungen reagieren und bis zu 67 vorab programmierbare Aktionen ausführen.
Schon im Jahr darauf traten zwei aus RoboSapiens bestehende Mannschaften im ersten weltweiten RoboCup-Fußballspiel zwischen autonomen humanoiden Robotern gegeneinander an. RoboSapiens Nachfolger, Roboraptor, verfügt über vier einstellbare Grundstimmungen, die ihn über seine Sensoren dementsprechend unterschiedlich auf äußere Reize reagieren lassen.
Für den spielerischen Heimgebrauch von Robotern sind entsprechende Bausätze mittlerweile zu erschwinglicheren Preisen erhältlich. Die meisten Modelle erinnern an primitive Amphibien, Hunde, Panzerwagen oder andere Fahrzeuge, und können per Fernbedienung gesteuert werden. Einige ihrer typischen Fähigkeiten sind Gesichtserkennung, Navigation und Transport von Gegenständen. Viele der fortschrittlicheren Anwendungen für Erwachsene erfordern Programmierkenntnisse.
Wenn Serviceroboter in Not geraten …
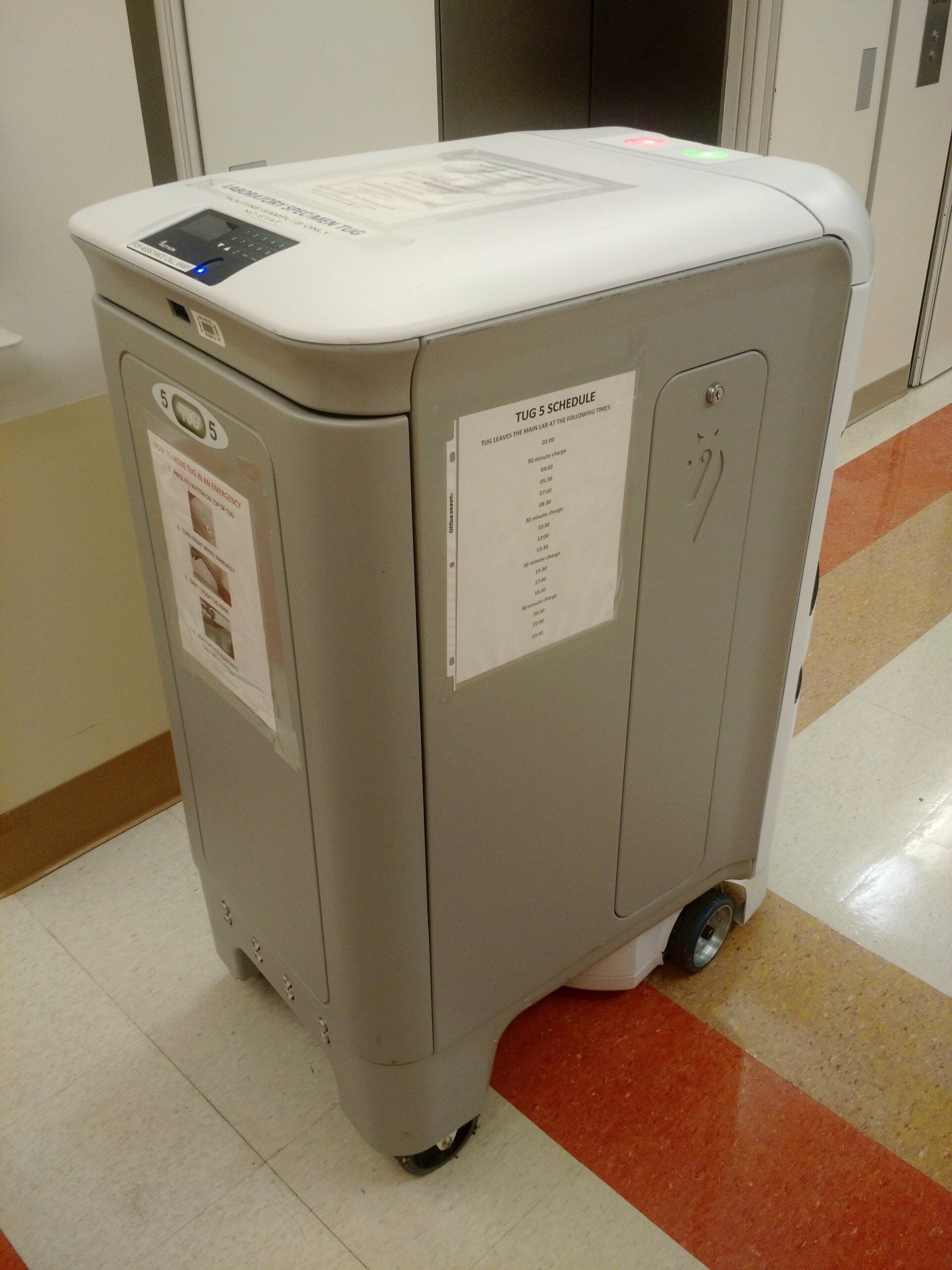
Schon seit über zehn Jahren bevölkern fleißige Maschinenarbeiter wie Tug the Robot Hotels und Krankenhäuser, wo sie Verpflegung, Bettwäsche, Medikamente oder Abfall transportieren. Dabei können sie via WLAN mit automatischen Fahrstühlen, Feuermeldern und Türen kommunizieren und verfügen über rudimentäre Sprachkenntnisse.
Vielerorts wurden für derartige Serviceroboter Hotlines eingerichtet, die sie eigenständig anrufen können, sollte ihr Weg in Hotel- oder Krankenhausgängen einmal von einem unüberwindbaren Hindernis blockiert sein und sich kein ihnen behilflicher Mensch in der Nähe befinden.
Insbesondere die Coronapandemie hat die Bedeutung von Robotern im medizinischen Bereich aufgezeigt: In einer Pandemie sind Roboter äußerst hilfreiche Kolleg:innen, denn im Unterschied zu Menschen werden sie nicht krank und können all jene Arbeiten ausführen, die für menschliches Krankenhauspersonal eine akute Gefahr darstellen. Dazu gehören etwa Fiebermessen oder das Verabreichen von Medikamenten.
Unterstützt durch eine intelligente Maschine, bleibt dem menschlichen Pflegepersonal dann mehr Zeit für diejenigen Tätigkeiten, die Roboter womöglich niemals werden ersetzen können: konzeptuelle Lösungen erarbeiten und empathische Beihilfe für Patient:innen leisten. Doch die Coronapandemie hat durch die weitläufige Lahmlegung der Wirtschaft auch gezeigt, dass wir noch weit davon entfernt sind, das Weltgeschehen von Robotern am Laufen halten zu können.
Das Zusammenspiel zwischen Mensch und Roboter hat übrigens einen komplett neuen Zweig namens Human-robot interaction (HRI) eröffnet. Die Sicherheitsansprüche im HRI-Bereich beruhen dabei grob auf den einst von Isaac Asimov formulierten Robotergesetzen, obwohl die Bereiche der Roboter- und Maschinenethik in ihrer Komplexität mittlerweile weit über diese drei einfachen Prinzipien hinaus gehen. So hat es sich etwa als Herausforderung herausgestellt, Pflegepersonal beizubringen, mit den künstlichen Gehilfen gut zusammenzuarbeiten.
Boston Dynamics: Roboter gehen viral
2013 schuf das Robotik-Unternehmen Boston Dynamics seinen Roboter Atlas für die DARPA Robotics Challenge, einen internationalen Robotikwettbewerb, der zwischen 2012 und 2015 ausgerichtet wurde und die Entwicklung von Robotertechnologien bei Rettungseinsätzen fördern sollte.
Atlas kann seine Umgebung mithilfe von mehreren Hundert Sensoren wahrnehmen. Während die größte Herausforderung des Roboters anfangs darin bestand, Ventile zu drehen und Türen zu öffnen, meistert der humanoide Roboter inzwischen sogar den Rückwärtssalto.
Boston Dynamics begeistert Menschen mit geschickt inszenierten Videos ihrer neusten Robotererfindungen. Diese 2018 veröffentlichten Videos beispielsweise zeigen, wie der hundeähnliche Roboter Spot Mini die Tür für einen weiteren SpotMini aufhält und sich dabei sogar gegen einen menschlichen Angreifer mit Hockeyschläger durchsetzen kann. Bei Youtube und Co. werden sie viele Millionen Mal aufgerufen.
Um die reale Situation zu simulieren, baut Boston Dynamics meist zunächst eine digitale Version ihres Roboters, trainiert diese mit Daten und Videomaterial, und testet das physische Ergebnis anschließend in einer Laborumgebung. Erst dann wird der Roboter auf die Realität losgelassen.
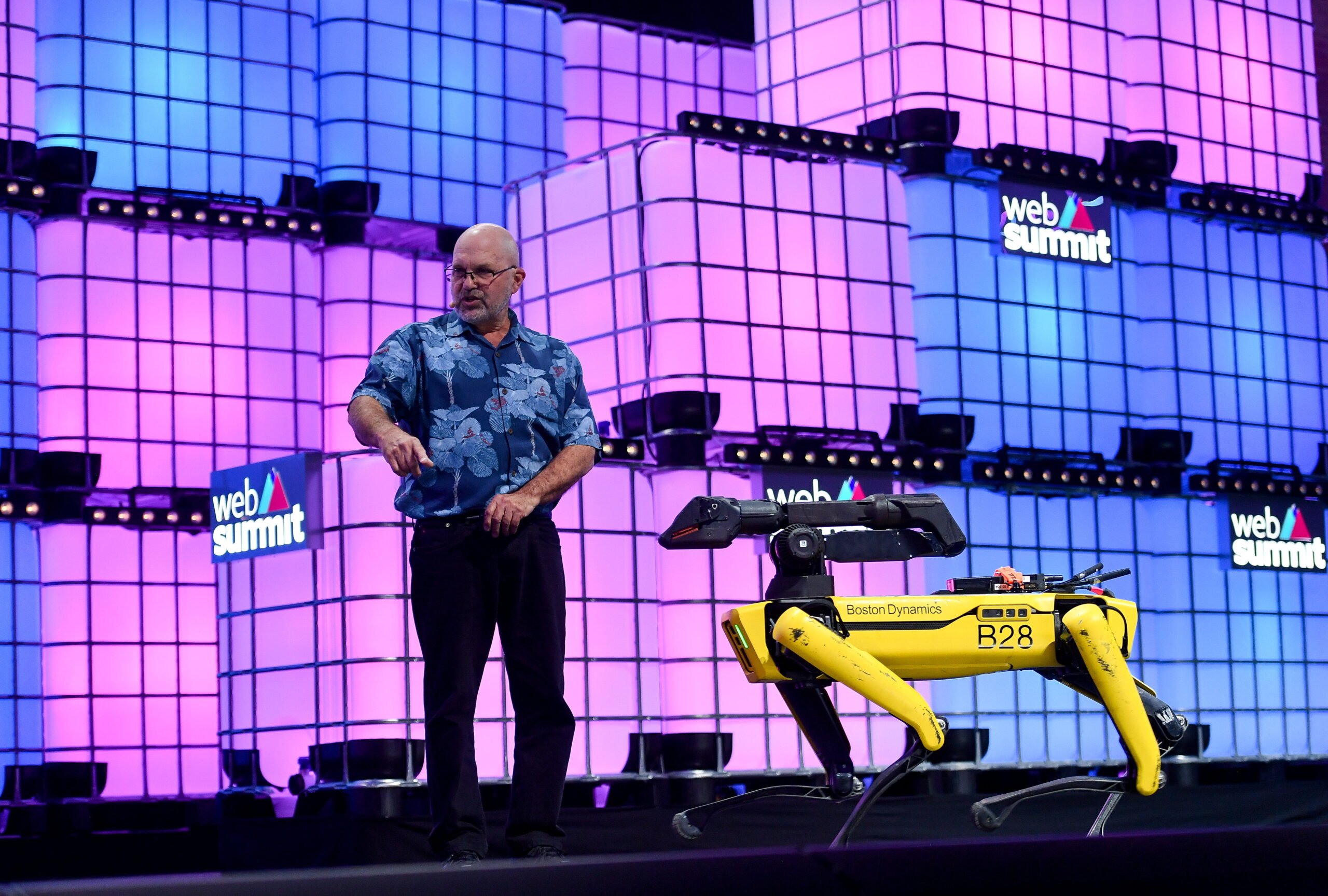
Inzwischen produziert die Firma, nunmehr größtenteils im Besitz des südkoreanischen Konzerns Hyundai Motor Company, seinen Vierfüßler-Roboter Spot in Serie und stellte ihn 2020 erstmals für eine Summe von 74.500 US-Dollar zum Verkauf frei.
Über 75 Unternehmen, darunter etwa SpaceX, nutzen Spot kommerziell. Er verfügt über eine Bandbreite an Fähigkeiten und kommt unter anderem teilautonom bereits auf Baustellen, im Bergbau, für das Einpflanzen von Setzlingen in der Landwirtschaft oder als Datensammelmaschine zum Einsatz. Zusammen mit seinem humanoiden Roboter-Kollegen Pepper, der auf das Lesen menschlicher Mimik spezialisiert ist, hat man ihn sogar schon tanzend als Baseball-Cheerleader gesehen.
Mit Feingefühl die Umgebung ertasten
Die Erfindung von Alltags- und Haushaltsrobotern ist die wohl größte Herausforderung in der Robotik. Im Unterschied zu vorprogrammierten, auf eine einzige Tätigkeit spezialisierten Industrierobotern müssen sich alltagstaugliche Roboter in unstrukturierten, veränderbaren Umgebungen zurechtfinden und eine Vielzahl an Tätigkeiten zuverlässig ausführen.
Zukünftige Haushaltsroboter werden etwa feinfühlig sein müssen, um zu unserem Vorteil handeln zu können. Bis vor kurzem fehlte es Robotern häufig am nötigen Fingerspitzengefühl – das bloße Halten eines Stifts war nicht zu bewerkstelligen, die weiche Haut einer Tomate wurde unvorsichtig eingedrückt, Eier gingen zu Bruch. Doch mittlerweile beherrschen Roboter dank eines verbesserten Tastsinns, der auf einer Vielzahl an empfindlichen Sensoren beruht, das Ertasten unterschiedlicher Oberflächen und das präzise Greifen von Objekten aller Art.
So haben Roboteringenieur:innen der TU München etwa eine sensible Kunsthaut entwickelt, die Roboter Berührungen spüren lässt, und Forschende der University of Southern California stellten eine taktile Kunsthand her, die verschiedenste Materialien registrieren kann. Auch die Firmen SynTouch und Meta entwickelten Roboter-Fingerspitzen und eine taktile künstliche Haut, die ein Spektrum an Empfindungen von Temperatur bis zur Oberflächenbeschaffenheit unterscheiden können.
Auch Googles Mutterkonzern Alphabet entwickelt lernfähige Roboter: Im Dezember 2019 stellte die Firma ihr „Everyday Robots“-Projekt vor. Während der erste Prototyp lediglich das Müllsortieren vortrefflich beherrschte, rücken neuere Modelle auf dem Google Campus mittlerweile Stühle zurecht, wischen Tische ab, sammeln Tassen ein und öffnen Türen.
Türen öffnen oder Stühle rücken - beide Aufgaben erledigt 033 mit nur einem Algorithmus. | Video: Alphabet
Mit Bestärkendem Lernen zu neuen Fähigkeiten
Damit Alltagsroboter aus ihrem primitiven Stadium herauswachsen und praktischen Nutzen stiften können, müssen sie autonomer agieren und selbstständiger lernen. So wurde 2015 beispielsweise in einem UC Berkeley Laboratorium der Roboter Brett (kurz für: Berkeley Robot for the Elimination of Tedious Tasks) entwickelt, der sich mithilfe von Reinforcement Learning beibringen konnte, welche Formen unterschiedliche Gegenstände haben, um diese Puzzleteile sodann einem Kleinkind ähnlich in die entsprechenden Löcher zu stecken.
Bei der innovativen RL-Methode baut man zunächst eine digitale Version des Roboters und simuliert die vorgegebene Problemstellung visuell, wodurch sich der Lernprozess beobachten lässt. Erst im Anschluss wird der programmierte physische Roboter im Labor mit diesem Wissen gespickt, trainiert und lässt sich nach erfolgreichem Testen in der realen Welt einsetzen. Die Simulation in einer perfekten Umgebung hat den Vorteil, dass Trial-and-Error-Schritte schneller als im realen Leben durchgeführt und erprobt werden können.
Nach diesem Lernschema hat eine Zweifüßler-KI etwa selbstlernend das Rennen erfunden: In einer Computersimulation bekam das mit zwei Armen und zwei Beinen ausgestattete, menschähnliche Objekt lediglich die Ansage, sich so schnell wie möglich vorwärts zu bewegen, ohne zuvor – nach konventionellem Prozedere – mit Fortbewegungsdaten gefüttert worden zu sein. Nach einigen anfänglichen Stolperversuchen fing der virtuelle Zweifüßler tatsächlich an zu laufen und brachte sich schließlich sogar das Rennen bei.
Video: In einer Simulation stellte Googles KI-Unternehmen Deepmind die Zweifüßler-KI vor die Aufgabe, sich von A nach B zu bewegen. Mithilfe von Reinforcement Learning lernte die KI schließlich nach dem Trial-and-Error-Prinzip, zu laufen und Hindernisse zu überwinden – auch wenn die Bewegungen auf uns Menschen manchmal etwas ungewöhnlich wirken mögen.
Eine ähnliche auf dieser neuen Herangehensweise beruhende Errungenschaft wurde unlängst an der Oregon State University geboren: Anhand von RL-Algorithmen brachte sich der Roboter Cassie selbst das Laufen bei, ohne dies zuvor durch direktes Programmieren oder Nachahmung gelernt zu haben.
Mehr über das Reinforcement Learning erfahrt ihr in unserem KI-Podcast Deep Minds mit Tim Rocktäschel von Facebook AI.
Roboterentwicklung: Die nächsten Schritte
Die oberflächlich betrachtet fortschrittlichen Fähigkeiten humanoider Roboter täuschen oftmals über ihre Begrenztheit hinweg. Sie lassen uns vergessen, dass wir es trotz allem mit programmierten, unkreativen, rein mechanischen Geschöpfen zu tun haben.
Auch wenn Roboter von Tag zu Tag intelligenter werden, ist weiter viel menschliche Hilfe nötig, bis sie ausgelernt haben und anspruchsvollere Tätigkeiten selbstständig ausführen können. Erst dann werden sie in der Lage sein, durch Beobachtung, Interaktion und Kommunikation eigenständig und kontinuierlich zu lernen und aktiv an unserem Leben teilzunehmen.
Ein wichtiger nächster Schritt besteht also darin, dass der simulierte Algorithmus lernt, zu lernen – ohne dass Programmierer:innen händisch Verbesserungen vornehmen müssen. Andernfalls müssten wir unsere selbst gebauten Maschinen auf ewig an die Hand nehmen, ohne dass diese in unserer veränderlichen und chaotischen Welt jemals selbstständig agieren und tatsächlich nützlich sein würden.
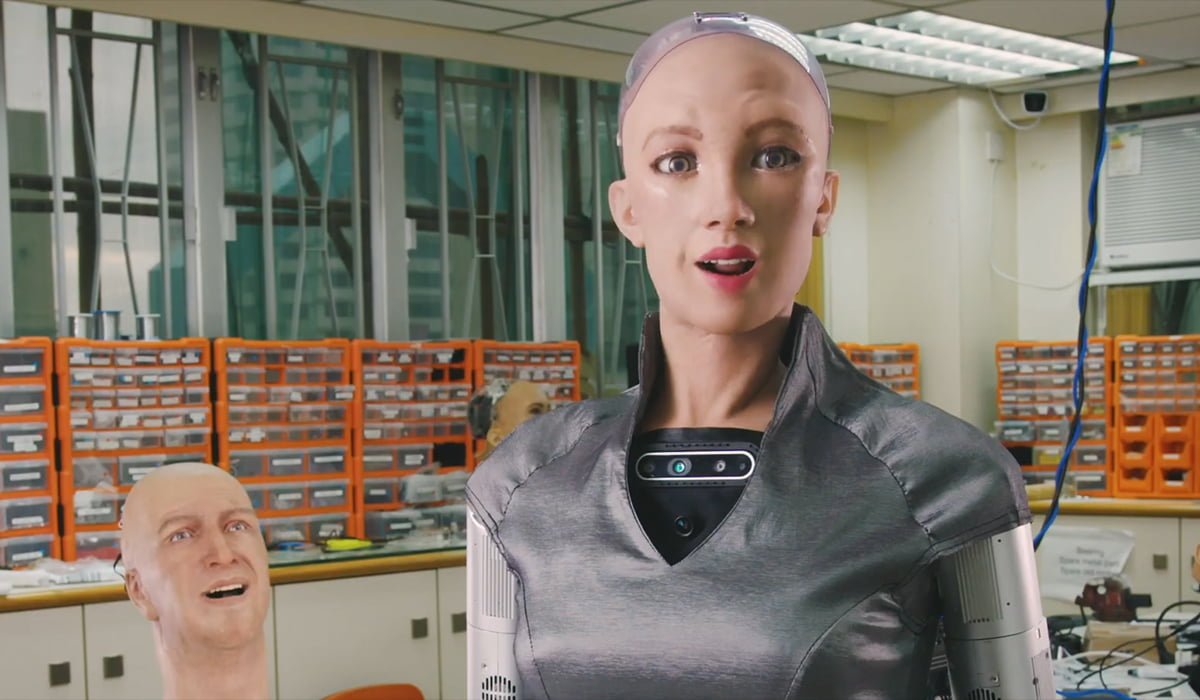
Video: Täuschend ähnlich? Der unlängst von der UK-Firma Engineered Arts entwickelte Roboter Ameca überrascht durch eine fließende Mimik, die beinahe menschlich wirkt.
In diesem Zusammenhang stellen sich weitere Fragen: Wie viel Macht sind wir bereit, an autonome Maschinen abzugeben? Wer haftet für vermeintliche Fehlentscheidungen einer Roboter-KI? Werden Roboter bald unsere Arbeitsplätze übernehmen?
Trotz berechtigter Bedenken, dass Roboter zu einer sozialen und existenziellen Krise des Menschen führen könnten, ist es ebenso möglich, dass Mensch und Maschine eines Tages harmonisch koexistieren, und dass die meisten Tätigkeiten nicht gänzlich von Robotern ersetzt, sondern gewinnbringend von diesen begleitet werden. Über die Szenarien einer Koexistenz von KI und Mensch sprechen wir in unserem Podcast zu KI und Philosophie.
Fazit: 100 Jahre Robotik – Fortschritt geht schneller, als man denkt
Roboter leben bereits unter uns: als Staubsauger, Rasenmäher, persönliche Assistent:innen, als Service- und Pflegeroboter oder zur Unterhaltung sind sie aus vielen Bereichen unseres täglichen Lebens nicht mehr wegzudenken. Doch es existiert weiter enormes Fortschrittspotenzial.
Stellen wir uns ihn also vor, den für jede:n erschwinglichen humanoiden Roboter im eigenen Zuhause, in dem alle hier beschriebenen Skills vereint sind: Er saugt Staub, räumt auf, sortiert präzise unseren Müll, parliert intelligent und unterhaltsam in mehreren Sprachen, kann geschmeidig laufen, Gegenstände tragen, Treppen steigen, musizieren und tanzen, und beherrscht sogar elegante Stunts wie Salti. Seine Mimik ist so realistisch wie die eines Menschen. Neues lernt er dadurch, dass wir ihm eine Zielstellung vorgeben, ohne ihn trainieren zu müssen.
Wie lange wird es noch dauern, bis es uns gelingt, das Wunder, das der Mensch ist, in derart perfektionierter Form nachzuahmen? Wie lange, bis dieser Roboter-Kumpel an unserer Seite Wirklichkeit wird? Angesichts der rasanten Entwicklung von der bloßen Wortschöpfung vor hundert Jahren bis zur jüngsten KI-getriebenen Entdeckung des Laufens wird das womöglich schneller gehen, als wir denken.
KI-News ohne Hype – von Menschen kuratiert
Mit dem THE‑DECODER‑Abo liest du werbefrei und wirst Teil unserer Community: Diskutiere im Kommentarsystem, erhalte unseren wöchentlichen KI‑Newsletter, 6× im Jahr den „KI Radar"‑Frontier‑Newsletter mit den neuesten Entwicklungen aus der Spitze der KI‑Forschung, bis zu 25 % Rabatt auf KI Pro‑Events und Zugriff auf das komplette Archiv der letzten zehn Jahre.
Jetzt abonnierenKI-News ohne Hype
Von Menschen kuratiert.
- Mehr als 20 Prozent Launch-Rabatt.
- Lesen ohne Ablenkung – keine Google-Werbebanner.
- Zugang zum Kommentarsystem und Austausch mit der Community.
- Wöchentlicher KI-Newsletter.
- 6× jährlich: „KI Radar“ – Deep-Dives zu den wichtigsten KI-Themen.
- Bis zu 25 % Rabatt auf KI Pro Online-Events.
- Zugang zum kompletten Archiv der letzten zehn Jahre.
- Die neuesten KI‑Infos von The Decoder – klar und auf den Punkt.