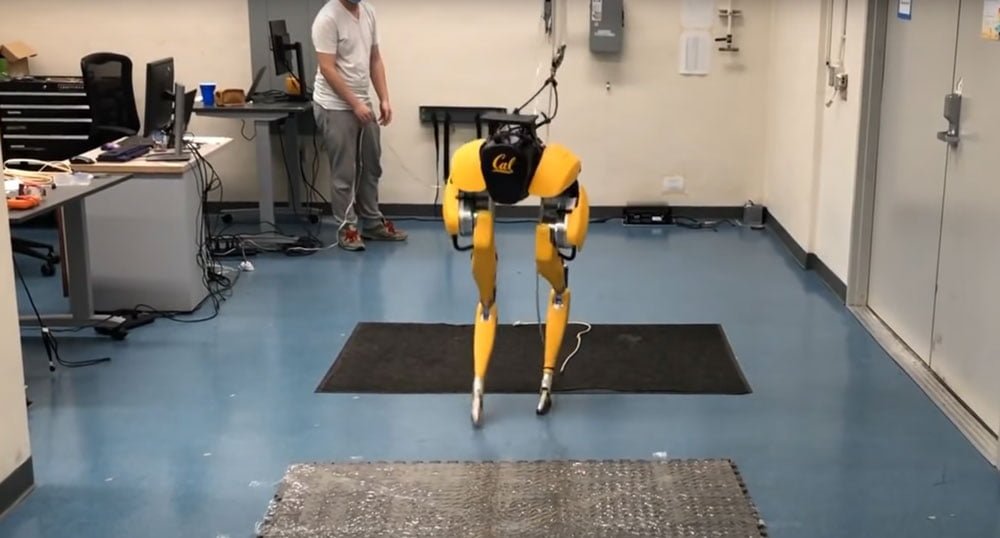
KI-Forscher zeigen einen zweibeinigen Roboter, der das Laufen in der Realität in einer Simulation lernte.
Ein Roboter stakst unbeholfen mit kleinen Schritten durch eine Halle, angeschnallt an eine Art Stützgerüst, das ihn im Notfall auffängt. Das soll beeindruckend sein? Schließlich kann Boston Dynamics humanoider Atlas-Roboter bereits Parkour laufen, Saltos springen oder tanzen.
Wie so oft, steckt der Teufel im Detail. Denn wer die Marketing-Videos von Boston Dynamics kennt, denkt schnell, Roboter könnten bereits auf zwei Beinen laufen – Problem gelöst. Doch hinter jeder beeindruckenden Bewegung von Atlas stecken oft Monate an Arbeit. Der genaue Prozess von Boston Dynamics, Roboterbeinen Beine zu machen, ist Betriebsgeheimnis. Doch noch steckt wohl eine Menge Handarbeit in den motorischen Fähigkeiten von Robotern wie Atlas oder Spot.
Der vergleichsweise wenig grazile Stützgerüst-Roboter hingegen hat den aufrechten Gang selbstständig gelernt: in einer Simulation. Seine staksigen Bewegungen zeigen deutlich, dass der Lernprozess noch nicht perfekt ist. Doch die beteiligten Forscher tragen zum großen Traum der Robotik bei: Roboter, die komplexe motorische Fähigkeiten selbstständig durch bestärkendes Lernen in einer Simulation lernen und in der echten Welt unter sich ständig ändernden Umständen zuverlässig anwenden können.
Gebaut wurde der zweibeinige Roboter „Cassie“ von Forschern der kalifornischen Universität Berkeley. Cassie kann in verschiedene Richtungen laufen, sich drehen, ducken, eine Last tragen und findet seinen Stand auch, wenn er ausrutscht.
Der Roboter ist vollautonom und verfügt lediglich über motorische Intelligenz: Die Bewegungsrichtung gibt ein Mensch per Controller vor, doch die Bewegungen der zwei Metallbeine werden von einer KI gesteuert.
KI-Simulationstraining mit künstlichen Hürden
Cassie wurde in zwei Schritten trainiert: Zuerst lernt eine KI eine Reihe von Bewegungen aus einer Datenbank und so, mit den Motoren die Beine zu bewegen. Mit diesem motorischen Grundgerüst ausgestattet, beginnt die KI anschließend das Simulationstraining.
In der Simulation erhält die KI zufällige Bewegungseingaben und muss einen virtuellen Cassie-Roboter entsprechend den Eingaben steuern. Mal geht es nach vorne, mal zurück, mal zur Seite und Drehungen sind ebenso notwendig, um Hindernisse zu umlaufen. Durch Versuch und Irrtum lernt die Cassie-KI den unfallfreien Spaziergang durch die virtuelle Welt.
Damit Cassie auch in der echten Welt gut abschneidet, veränderten die Forscher eine Reihe von Faktoren in der Simulation zufällig. So simulierten sie etwa kurzfristige Sensorfehler oder eine Verzögerung in der Kommunikation zwischen KI-Anweisung und Reaktion der Motoren von Cassie.
Nach dem Simulationstraining testeten die Forscher Cassie in einer zweiten Simulation, die die Physik der echten Welt möglichst genau abbildet. So können die Forscher vor dem Echtwelt-Einsatz bereits testen, welche in der ersten Simulation gelernten Bewegungsverhalten sich am besten für den realen Einsatz eignen.
Der echte Cassie-Roboter kann durch das KI-Training ohne weitere Feineinstellungen über verschiedene Untergründe laufen und mit äußeren Krafteinwirkungen wie einem Stoß umgehen. Cassie konnte sich direkt in einer realen Fehler-Situation behaupten: Sie kompensierte den Ausfall von zwei Motoren in einem Bein und hielt die Balance. Diese Situation war nicht Teil des geplanten Trainings und zeigte, dass Cassie robuste motorische Fähigkeiten erlernt hat.
Virtuelle Simulation beschleunigt KI-Entwicklung
Der für Cassie eingesetzte Trainingsansatz könnte in Zukunft für die schnelle Entwicklung von Roboter-Prototypen verwendet werden und helfen, die häufig hervorragende Leistung von Robotern – oder Künstlicher Intelligenz generell - in Simulationen besser in die Realität zu übertragen.
Die Überbrückung dieser „Realitätslücke“ ist eine der großen Herausforderungen des bestärkenden Lernens in der Robotik: Der Transfer der Simulationsleistung in die echte Welt wird unter dem Stichwort „Sim2Real“ diskutiert und der Diskurs dadurch bestimmt, dass KI in der Realität an Aufgaben oder Situationen scheitert, die sie in der Simulation noch meistert (oder gar nicht erst erlebt).
Doch bis zur tanzenden Cassie, die elegant Parkour läuft, wird es wohl noch eine Weile dauern. Die Forscher wollen als nächstes Cassies Lauffähigkeiten weiter verbessern und dem Roboter neue Bewegungen beibringen.
Ein werbetauglicher Roboter wie Atlas könnte dennoch dabei entstehen: Ein YouTube-Video zeigt einen Roboter, der in einer Simulation ein Snakeboard fährt. Mit dieser steuerbaren Variante eines Skateboards schlängelt sich der Zweibeiner um Hindernisse.
Die Gruppe forscht außerdem an einem Robotergefährten für Blinde und sehbehinderte Menschen. Den Prototyp seht ihr im folgenden Video im Einsatz.
Titelbild: Li et al. | Via: Arxiv